Intelligent control schemes, Nonlinear systems, Adaptive control, Neural networks, Event-triggered control, Fuzzy rationale systems, Adaptive energetic programming, Sliding mode control, Model-free versatile control, Uncertain disturbances.
Non-linear systems are difficult to control because there is no systematic procedure available for linear systems. The mathematical model that we use for nonlinear system control necessitates the use of a costly and sophisticated instrument. An intelligent system, which is expected to have humanlike expertise in a specific domain, adapts and learns to perform better in any situation.
Soft computing is a method for building computationally intelligent systems that includes several computing techniques such as neural networks, fuzzy set theory, and derivate free optimization methods such as genetic algorithms and simulated annealing. As it effectively incorporates human knowledge, it learns to deal with imprecision and uncertainty, and it learns to adapt to unknown or changing environments for improved performance.
Many systems in modern control have strong interference, nonlinear, time-varying characteristics, and traditional PID control is insufficient. Furthermore, as the object or operating condition changes, the control quality of its parameters degrades. Intelligent control, particularly neural network control and fuzzy control, has recently emerged as a critical issue in the control field. Because of the belief that they have greater predictive power than signal analysis techniques, artificial neural networks (ANNs) have been used as computational tools for data quality identification. A neural network is a type of mathematical function approximation that can be trained to learn. They have been used to design control systems, and in many cases, astonishingly accurate performance has resulted. [1]
Control of Nonlinear Systems:
A nonlinear system can be controlled in a variety of ways to behave like a linear system in terms of overall performance. Making a nonlinear system behave like a linear system has numerous advantages because linear systems are much easier to work with and understand. Even if a model of the nonlinear system is available, no systematic and generally applicable control theory exists for the design of nonlinear system controllers. Nonlinear Systems Because of their simple structure and robust performance in a wide range of operating conditions, proportional-integral derivative (PID) controllers are the most well-known controllers used in industrial control processes.
Attempts have been made to control nonlinear plants using feed forward and recurrent neural networks. The work presented here employs two neural networks, one for representing the controller’s requirements and the other for representing the system from input output data if the plant model is not known in a mathematical form. [2]
INTELLIGENT CONTROL:
Intelligent control is the use of artificial intelligence (AI) methods to design and implement automatic control systems. An intelligent system is described as follows in an IEEE task force report: An intelligent system can act appropriately in an uncertain environment, where appropriate action is defined as that which increases the probability of success, and success is defined as the achievement of behavioural subgoals that support the system’s ultimate goal. Intelligence is a system property that emerges when the procedures of focusing attention, combinational search, and generalisation are applied to input information to produce the output.
Machine intelligence is the process of analysing, organising, and converting data into knowledge, where (machine) knowledge is defined as structured information acquired and applied to remove ignorance and uncertainty about a specific intelligent machine task. A useful definition of intelligence must encompass a wide range of abilities, including the ability to make decisions, control action, and sense the environment. Such decision-making should be autonomous, resulting in improved overall performance over time. [3]
Today, several AI methods are well established, and some of them have been used to design control systems, the most prominent of which are expert systems, fuzzy logic, genetic algorithms, and neural networks. Researchers have occasionally proposed using hybrid AI controllers, Nonlinear Systems which are combinations of two or more of these techniques. In this paper, we will discuss intelligent control systems that employ neural networks.
NEUROCONTROL:
Nonlinear Systems Connectionist or neural network methods, which are intended to mimic the human learning process on a much smaller scale, have become particularly effective tools for building intelligent control systems. Currently, the term “neuro control” is used in control system literature to describe control strategies that make use of neural networks. It’s been proven that neural networks perform well for both identifying and managing complicated dynamical systems.Nonlinear Systems the identification and control of nonlinear dynamic (time-varying) plants present a significantly more challenging task to the designer than linear-time invariant plants, which can be controlled relatively efficiently with standard techniques based on linear systems theory.
The latter category comprises the majority of industrial process plants in real life, necessitating the use of sophisticated approaches for system control. Out of all the other “intelligent” methods, neuro control seems to be gaining in acceptance. In order to create more intelligent control systems, Nonlinear Systems it is worthwhile to try to design more effective training methods and enhanced learning algorithms. This is because these approaches are based on what are often referred to as “training” and “learning.” The process for adaptively controlling a nonlinear plant heavily relies on the knowledge that is already known about the unidentified plant. This includes understanding the limitations of adaptive neuro control. [4]
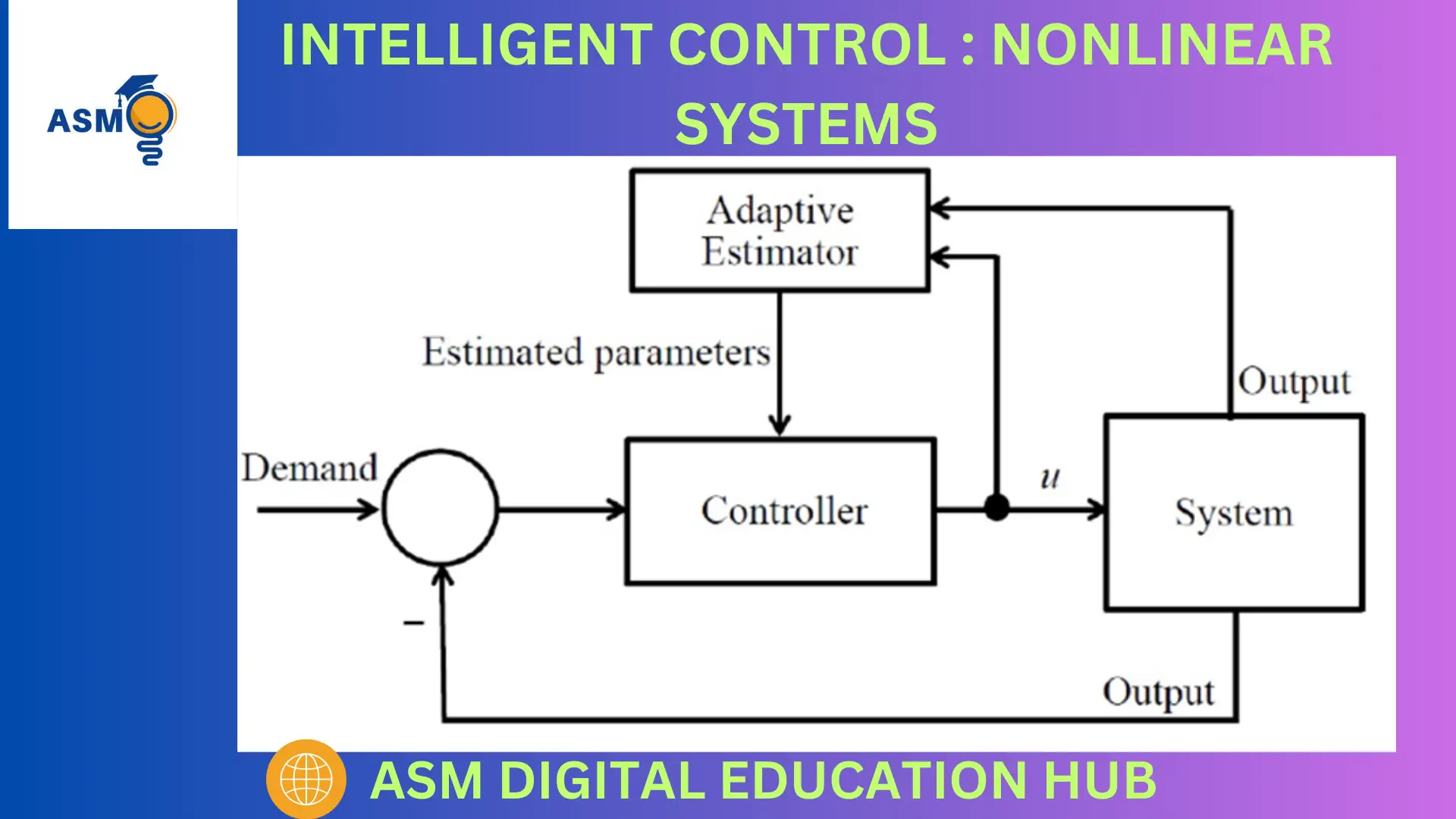
ADAPTIVE NEUROCONTROL:
The design of a control system has two fundamental components: controller design and plant identification (or modelling). Both of these domains have successfully used neural network approaches, and it is currently being investigated whether the MRAC concept can be implemented using neural networks.
Nonlinear Systems: This study provides a comprehensive survey of various nonlinear, adaptive, and intelligent control approaches used by various researchers for quadrotor control. Each control scheme is thoroughly investigated in terms of various performance-based aspects such as robustness, adaptation to different parametric variations, Nonlinear Systems parametric uncertainty handling, step response, asymptotic convergence, exponential convergence, finite time convergence, and global stability, among others.
Most recent Advancements in Cleverly Control Plans for Nonlinear Systems
Nonlinear Systems: Recent progressions in brilliantly control plans for nonlinear frameworks have presented inventive procedures that address different challenges in the field. Key ranges of center incorporate versatile control, event-triggered components, and the integration of neural systems and fluffy rationale systems.
Nonlinear Systems: Versatile control techniques have advanced essentially. Modern strategies consolidate versatile neural systems and fluffy rationale frameworks to improve the strength and execution of controllers. For occasion, Nonlinear Systems versatile event-triggered control plans are being created to optimize following execution beneath questionable unsettling influences and compelled inputs (SpringerLink) (SpringerLink).
Nonlinear Systems: The utilize of event-triggered control has picked up footing. These components actuate control activities based on particular occasions or maybe than persistent checking, lessening computational stack and progressing productivity. Nonlinear Systems Event-triggered self-learning plans utilizing versatile energetic programming (ADP) are especially viable in overseeing questionable nonlinear systems (SpringerLink) (SpringerLink).
Nonlinear Systems Neural systems play a pivotal part in cutting edge cleverly control plans. Procedures like versatile terminal sliding mode control use neural systems for exact path-following and following control of frameworks with noteworthy instabilities. Nonlinear Systems These strategies improve framework steadiness and vigor, particularly in applications like mechanical autonomy and aerospace (SpringerLink).
Model-free versatile control utilizing intuitionistic fluffy neural systems has appeared promising comes about. This approach does not require point by point framework models, making it profoundly flexible and pertinent to a wide run of nonlinear frameworks. Nonlinear Systems By approximating framework behavior with pseudo-partial subordinates, these controllers accomplish solid execution indeed in complex environments (SpringerLink).